

导读:发展新一代的柔性电子器件对力学传感提出了更高的要求,即不仅可以检测到传感器表面的法向力/压力,还需要同时感测切向载荷。
发展新一代的柔性电子器件对力学传感提出了更高的要求,即不仅可以检测到传感器表面的法向力/压力,还需要同时感测切向载荷。许多研究已提出将具有各种多孔结构的弹性材料应用于柔性压力传感技术中,以提升器件性能。然而,在该领域中,空间任意方向力感测与多孔材料变形以及电学特性变化之间的基本相关性仍然未知,如何对复杂力-电耦合问题的精确高效解耦仍然是一个巨大的挑战。苏州大学功能纳米与软物质研究院刘坚教授团队与电子信息学院陈新建教授团队(共同通讯)在多孔弹性介电材料、柔性织物电极的基础上,发展了可用于空间任意方向力检测的柔性传感器,并提出一种高效的线性拟合法,来解耦复杂的非线性数学问题,揭示了多孔弹性体在电性能增强和任意接触力引起的几何变形之间的关键协同作用。相关结果以“Sensing ArbitraryContact Forces with a Flexible Porous Dielectric Elastomer”为题发表在《Materials Horizons》期刊,苏州大学聂宝清副研究员为第一作者。
基于多孔弹性介电材料的传感器设计及性能分析
该传感器由两个具有导电图案的柔性棉层和一个具有多孔网络的介电弹性体薄膜组成。导电图案化的柔性棉层是利用胶带掩膜板将体积电阻率为100mΩ mm的导电银浆涂覆到棉层表面。介电层通过特殊加工做成多孔结构,然后通过一系列组装制成基于多孔介电弹性体的传感器。
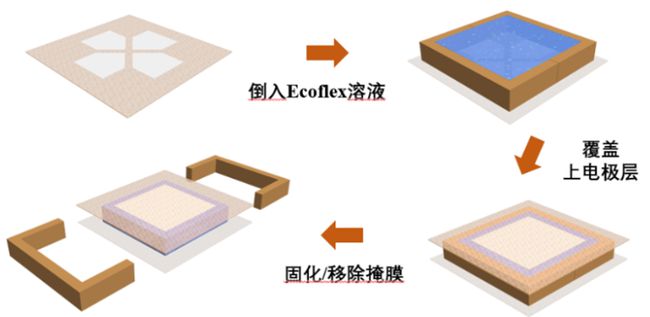
图1传感器制作流程
传感器的介电层采用的是微孔结构的,为了对比其与实心的柔软度,该团队做了固体和微孔弹性体之间介电常数变化的比较。微孔结构与实心结构相比,微孔结构的介电常数增加了35.58%。具有多孔弹性体的传感器在压缩力下的电容变化是固态弹性体传感器的3倍。
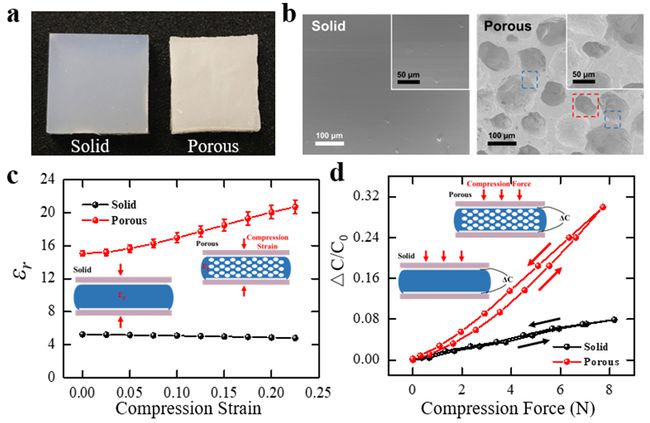
图2固体/多孔结构比较
解耦数学模型的建立
为了确定三维力与电容输出之间的转换原理,我们建立了力与电容之间的系数矩阵A。具体而言,我们使用最小二乘法基于的数据集( ΔC1/C10 、 ΔC2/C20 、 ΔC3/C30 、 ΔC4/C40 、 Fx 、 Fy 、 Fz)构造系数矩阵。力和电容可通过以下方程进行预测:

根据方程式(3)-(5),我们可以得出结论:(1)如果仅施加切向力,则C 13和C 24分别与Fy和Fx成正比;如果仅施加法向力,C tot与Fz成线性关系。该结论与以固体弹性体作为介电层的三维力传感器的结论相似。(2)C tot在很大程度上受到公式(5)中切向力的二次项的影响。它是由于Fx或Fy的存在使重叠面积变化(增加或减少)和介电材料的介电常数同时增加的卷积而产生的。(3)如果法向力和切向力同时作用于传感器,则C 13,C 24和C tot,都会受到这两个力的协同作用,即Fy×Fz或Fx×Fz的影响。当PDiF传感器受到一个、两个和三个方向的外部负载时,四个单元C1、C2、C3和C4的相对电容变化的实验测量值(蓝点)和拟合数据(红点)之间的比较,结果显示实验数据与拟合数据的均方根误差在3.3%以内(图3)。因此,我们使用线性回归方程成功地开发了一个解决这个复杂非线性问题的方法,该方法计算效率高,结果准确。它为我们理解多孔结构受任意三维接触力的影响提供了重要线索。
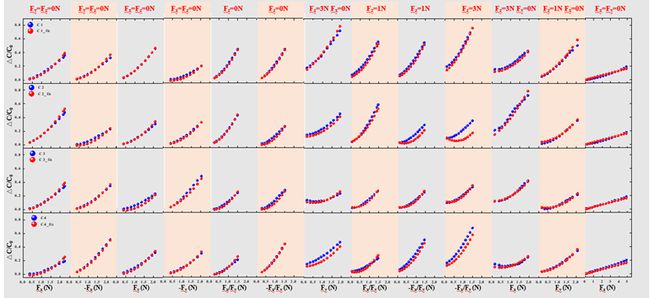
图3实验测量值(蓝点)和拟合数据(红点)对比图
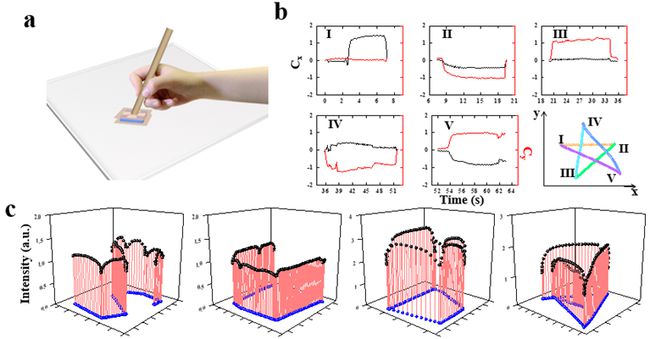
该设备已在多种情况下用于软接触力检测,包括表面粗糙度区分,物体滑移测量和手写识别。集成了多孔弹性体的传感器为新兴的可穿戴电子设备提供了高度灵敏且灵活的触觉传感平台。
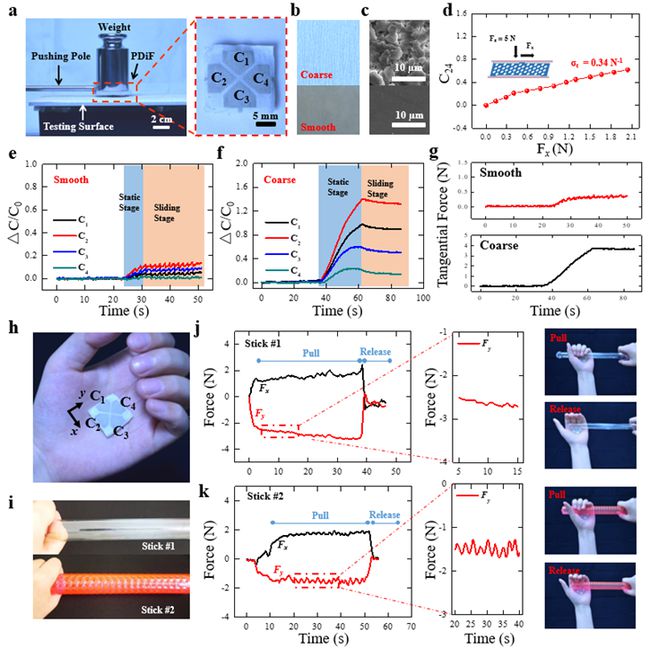
图4表面粗糙度区分,物体滑移测量
总结
该研究开发了一种可穿戴的任意接触力传感设备,其特征在于具有高介电常数的多孔弹性体。与固体结构相比,多孔结构传感器电容响应提高了三倍。并且已经成功地建立了数学模型,以解决任意接触力和电容输出之间的复杂非线性关系,从而机械地揭示了孔隙变形对接触力耦合的影响。另外,传感器已经证明了在柔性触觉感测中的概念验证应用,包括表面粗糙度判别,滑动检测和手写中的实时力映射。它为灵活地感应嵌入微结构的弹性体材料中的复杂接触力提供了一种途径。
原文发表链接:
Materials Horizons, 2021, DOI:10.1039/D0MH01359E
来源:高分子科学前沿
声明:仅代表作者个人观点,作者水平有限,如有不科学之处,请在下方留言指正!
